
About Me
This is a little essay about myself and my work. For a quick reference take a look in my CV.
I am a post-doc researcher, originally from Germany but currently located in Tokyo, Japan. My biggest passion since my early youth is computer science. I was born 1990 in a super rural area in western Germany. While it was nice to grow up in a natural envirnment, I had a strong desire to break out of there and follow my dream of studying computer science. After I transferred from the Middle-School to the High-School (German: Gymnasium) and finished it, I moved to Bielefeld immediately to study Cognitive Informatics. I can definitely confirm, that this city exists, but most people from abroad probably wouldn’t know it. However, it is a great place to live and also a great place for studying computer science since there is a cluster of excellence (CITEC), which means great research conditions and a variety of possibilities for students. Also, people don’t study only computer science there, but computer science bundled with a certain minor. I was studying Cognitive Informatics, which had computer science as major topic but with many links to a variety of cognitive sciences. Informatics alone might be a bit tasteless, but for me the combination with cognitive sciences makes it very interesting - especially for robotics where many cognitive models can be applied to. Also, what would be a better embodyment for state-of-the-art AI approaches than a robot? - Yes, there is none!
In my studies I focussed mainly on machine learning, computer vision and robotics. Regarding the latter, I e.g. competed with the Team of Bielefeld (ToBI) in the robocup@home German open competition and world championship in Hefei, China where in both competitions we won the 3. place. I liked especially to work very hard in a team of passionate people and to hack day and night to get the tasks done at the competition. I also attend smaller hackathons from time to time.
As a master’s project, together with a colleague I implemented an application with the Nao robot from Aldebaran, which we also evaluated within a user study. The application was a cooperative human-robot ball maze where the robot could also give suggestions where the human should navigate next. The cooperative human-robot topic I deepened afterwards in my PhD but more on this later.
Also, I was tutor during a major part of my studies, an activity that I found very pleasing (well, most of the time haha).
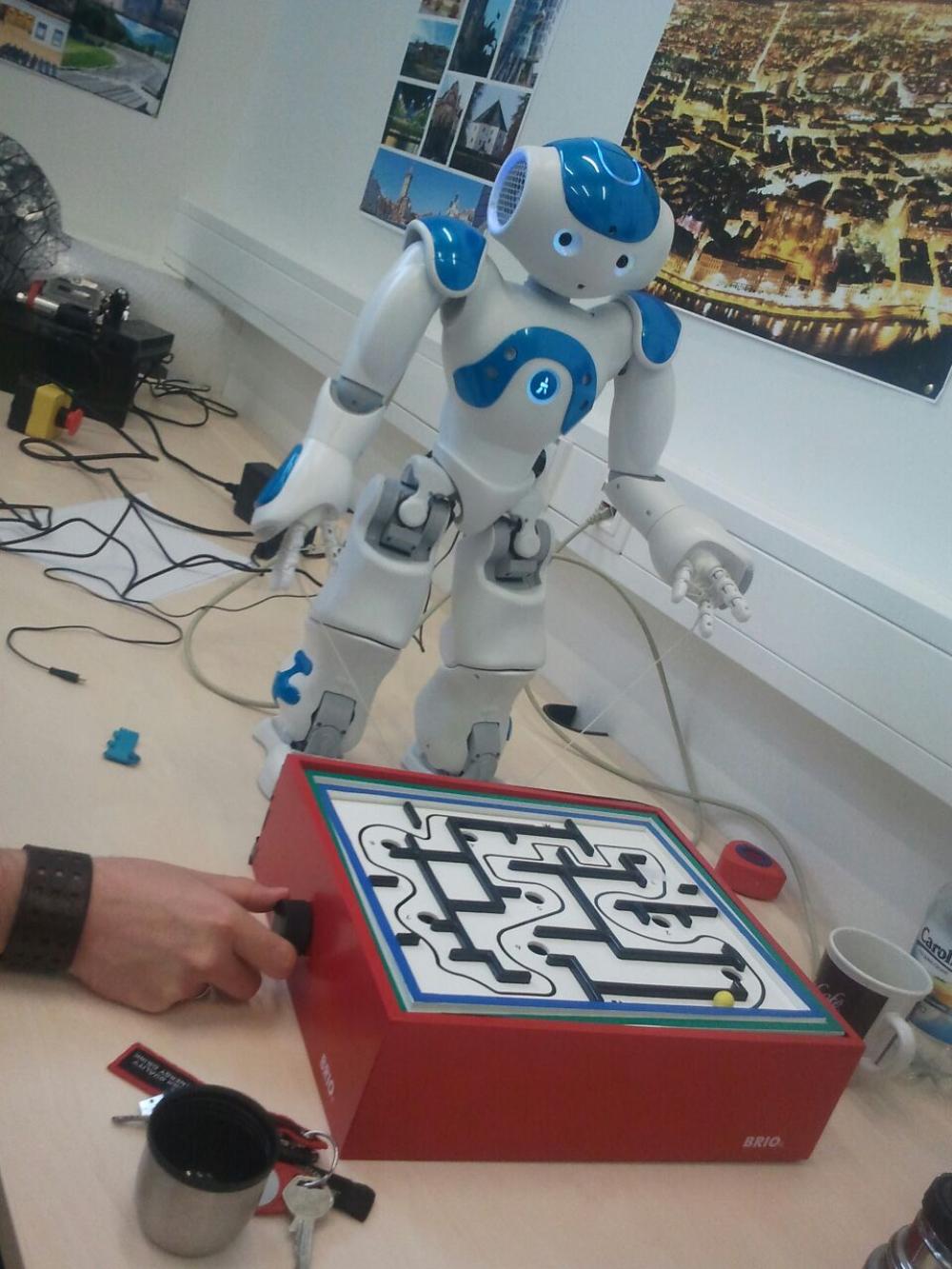 Cooperative ballmaze game with Nao robot.
Cooperative ballmaze game with Nao robot.
 In-field debugging at robocup@home competition.
In-field debugging at robocup@home competition.
For my Master Thesis I worked half a year at the company CLAAS KGaA mbH, the europen market leader in combined and forage harvesters. I developed a vision system for recognizing anomalies in front of the harvester. I greatly enjoyed working at this company building that big vehicles for nourish the world.
After finishing my Master Intelligent Systems, I decided to do a PhD on the topic of cooperative robotics. My PhD-position was within a cooperation with CITEC and the Honda Research Institute EU near Frankfurt, where I worked for over 3 years. In my studies I applied Active Learning in an Human-Robot-Interaction scenario which involved learning environments with a robot and the human in-the-loop. I found that it is crucial for an effective collaboration, that the robot has a competency model for both human and the robot itself. I introduced extensions for active learning models to achieving this conceiceness of the own and partners capabilities. Also, I introduced e.g. an interactive labeling interface, enable both diverse partners to work together effectively.
Service robot scanning lab environment for objects of interest.
I decided to continue my studies in a post-doc abroad. After a demanding time of writing my thesis and the pandemic, I wanted to go to a country that is very different from my homecountry Germany to get some different input and broaden my perspective. I found out about the IFI post-doc scholarship of DAAD, for which I sucessfully applied for to work at National Institute of Informatics (NII) in Tokyo. Tokyo is an awesome place to live and I growed alot in a personal and also in a professional way. In my post-doc I focused more on Neural Networks and Explainable Object Detection (Approach 1 and Extension) and also broaden my expertiese to Generative Models for e.g. Audio Sample Generation and Large Multimodel Models (LMMs). I think Transformer-based architectures and Large Language Models offer great possibilities for applications that wheren’t feasible in the past. This is also the reason why I want to shift my work in this direction. Currently I’m working on how explanaitions given by those models can be verified.
Deep Detection Dream - Image Reconstruction from YOLO BoundingBox Output.
Thinking back to my previous research, most revarding to myself is the combination of research and the practical implementation of an approach e.g. within a tech-demo application. I would say that my skill-set is versatile and allows me to do that.
Drone detecting human and classifying their actions (not shown in the video) by two zero-shot promptable VLMs.
If you want to learn more about me, take a look at my CV for a concise summary of my key qualifications and experiences. To read more about my current projects and research, visit the Projects and Publications pages. For insights into my personal interests beyond my professional life, check out the Interests page.